图像变换
基本的图像变换有刚性变换(等距变换、欧式变换)、相似变换、仿射变换、射影变换(透视变换、投影变换)
刚性变化:只对图像进行平移与旋转,形状保持不变
欧式变换(等距变换)保持了向量的长度和夹角,相当于我们把一个刚体原封不动地进行移动或旋转,不改变它自身的样子
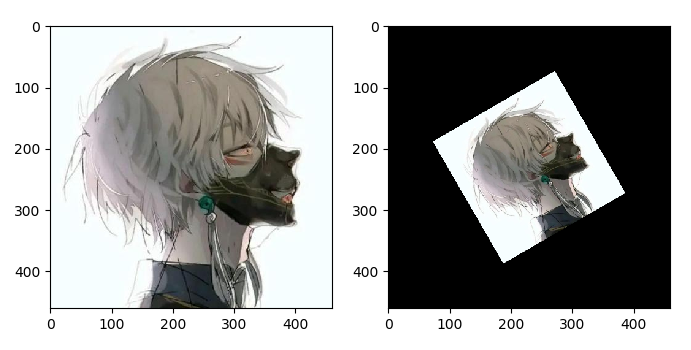
相似变换: 等距变换与一个均匀缩放的复合;等距变换+ 均匀缩放,类似相似三角形,比例不变
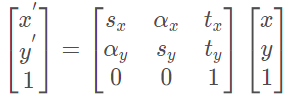
相似变换比欧氏变换多了一个自由度,它允许物体进行均匀的放缩,其矩阵表示形式为:
import cv2
import matplotlib.pyplot as plt
import numpy as np
img = cv2.imread('/hone/chy/pic/git.png', 1)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# print(img.shape)
# 得到相似变换的矩阵 # center:旋转中心 angle:旋转角度 scale:缩放比例
M = cv2.getRotationMatrix2D(center = (img.shape[0]/2,img.shape[1]/2),
angle = 30,
scale = 0.5)
# 原图像按照相似矩阵进行相似变换 三个参数:原图像,相似矩阵,画布面积
img_rotate = cv2.warpAffine(img, M, (img.shape[0], img.shape[1]))
plt.figure(figsize=(8,8))
plt.subplot(1,2,1)
plt.imshow(img)
plt.subplot(1,2,2)
plt.imshow(img_rotate)
plt.show()
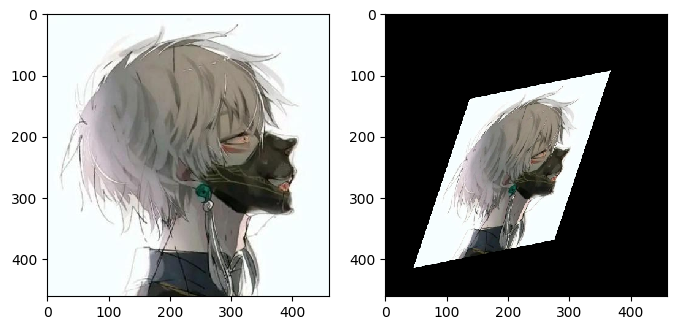
仿射变换:非齐次坐标下的一个非奇异线性变换与一个平移变换的复合,(即第三行是0,0,1); 旋转+平移+缩放+切变,保持平行性
仿射变换只要求 A 是一个可逆矩阵,而不必是正交矩阵。仿射变换也叫正交投影。经过仿射变换之后,立方体就不再是方的了,但是各个面仍是平行四边形
- 性质:Parallel lines are still parallel lines(不再具有保角性,具有保平行性)
- 三个非共线的点对(6 parameters)确定一个仿射变换。
import cv2
import matplotlib.pyplot as plt
import numpy as np
# 3 Src(原始) Points + 3 Dst(目标) Points
# cols:列/长 rows:行/宽
img = cv2.imread('lenna.jpg', 1)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# print(img.shape)
cols = img.shape[0]
rows = img.shape[1]
pt1 = np.float32([[0,0], [cols, 0], [0, rows]])
pt2 = np.float32([[cols*0.3, rows*0.3], [cols*0.8, rows*0.2], [cols*0.1, rows*0.9]])
# [[0,0], [cols, 0], [0, rows]] --> [[cols*0.3, rows*0.3], [cols*0.8, rows*0.2], [cols*0.1, rows*0.9]]
M = cv2.getAffineTransform(pt1, pt2) # 仿射变换矩阵
dst = cv2.warpAffine(img, M, (cols, rows))
plt.figure(figsize=(8,8))
plt.subplot(1,2,1)
plt.imshow(img)
plt.subplot(1,2,2)
plt.imshow(dst)
plt.show()
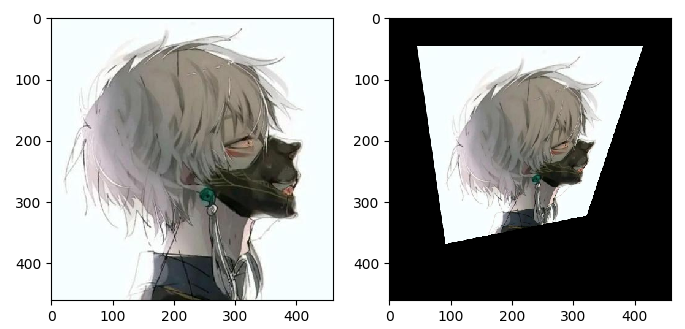
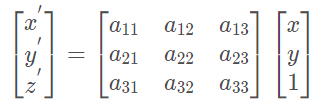
射影变换:次坐标的一般非奇异线性变换 。射影变换可以分解为相似变换,仿射变换,射影变换的复合,不保留平行性,保留重合关系、长度的交比
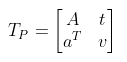
它左上角为可逆矩阵 A,右上为平移 t,左下缩放 a^{T} 。由于采用齐坐标,当 v \neq 0 时吗我们可以对整个矩阵除于 v得到一个右下角为 1 的矩阵;否则,则得到右下角为 0 的矩阵。因此,2D 的射影变换一共有8个自由度,3D则共有15个自由度。
- 性质:Lines are still lines(不保角,不保平行,保直线性)
- 四个非共线的点对(8 parameters)确定一个透视变换
import cv2
import matplotlib.pyplot as plt
import numpy as np
img = cv2.imread('lenna.jpg', 1)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
width = img.shape[1]
height = img.shape[0]
pts1 = np.float32([[0,0], [width,0], [0,height], [width,height]])
pts2 = np.float32([[width*0.1,height*0.1], [width*0.9, width*0.1], [height*0.2,height*0.8], [width*0.7,height*0.7]])
M_warp = cv2.getPerspectiveTransform(pts1, pts2) # 单应性矩阵
img_warp = cv2.warpPerspective(img, M_warp, (width, height))
plt.figure(figsize=(8,8))
plt.subplot(1,2,1)
plt.imshow(img)
plt.subplot(1,2,2)
plt.imshow(img_warp)
plt.show()