SLAM技术
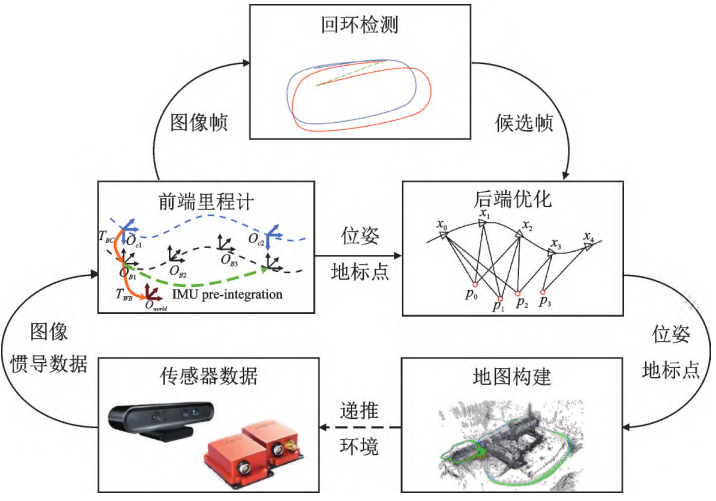
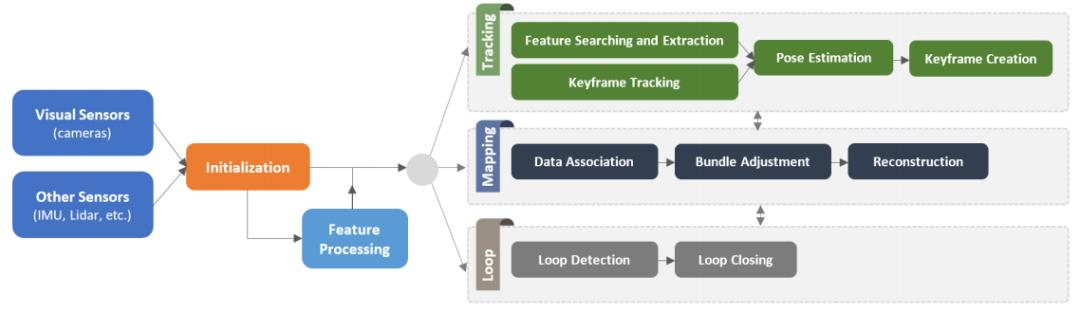
同步定位与建图(Simultaneous Localization and Mapping,简称SLAM)问题可以描述为:机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置和地图进行自身定位,同时在自身定位的基础上建造增量式地图,实现机器人的自主定位和导航。
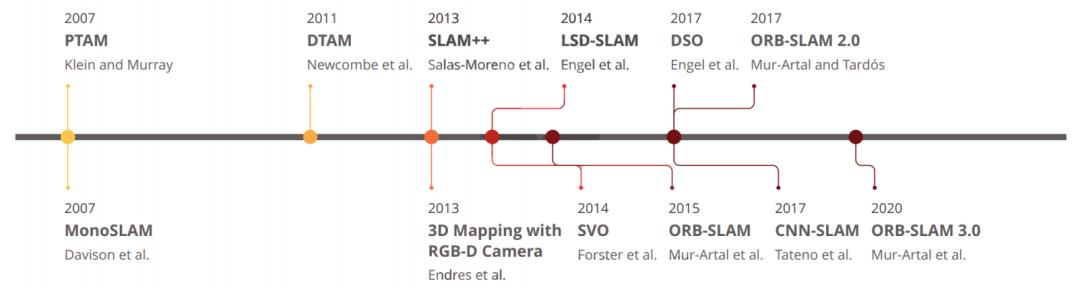
SLAM 技术主要呈现以下 3 点发展趋势。
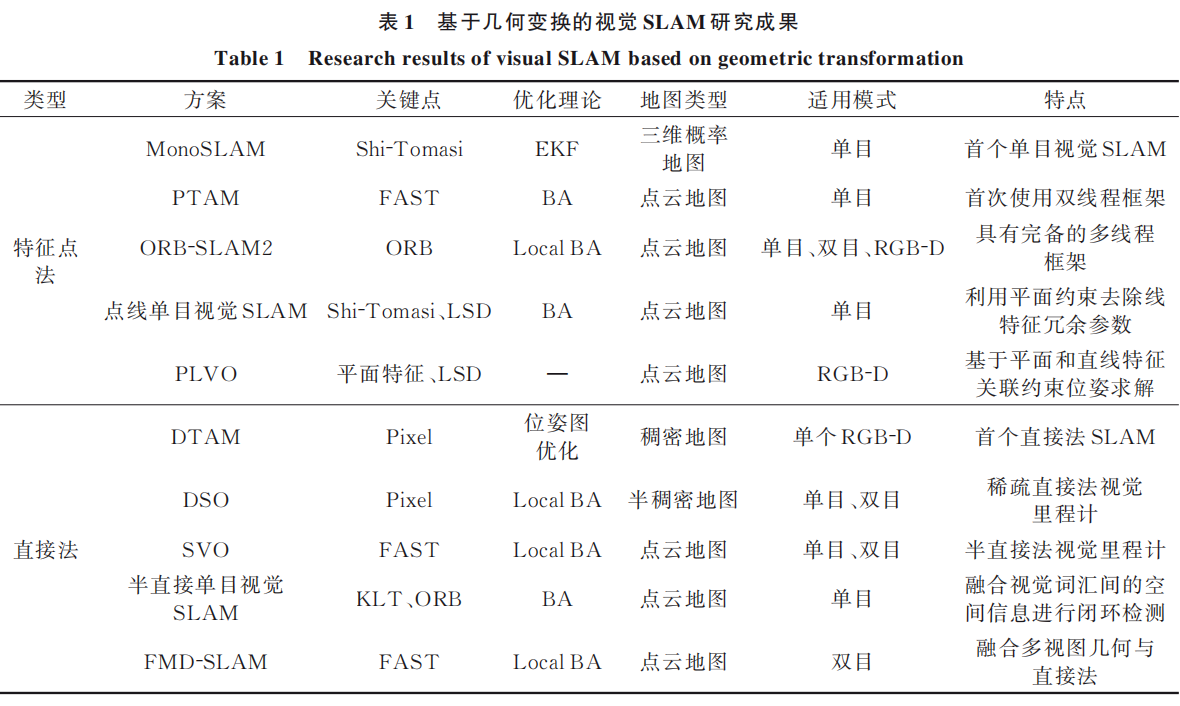
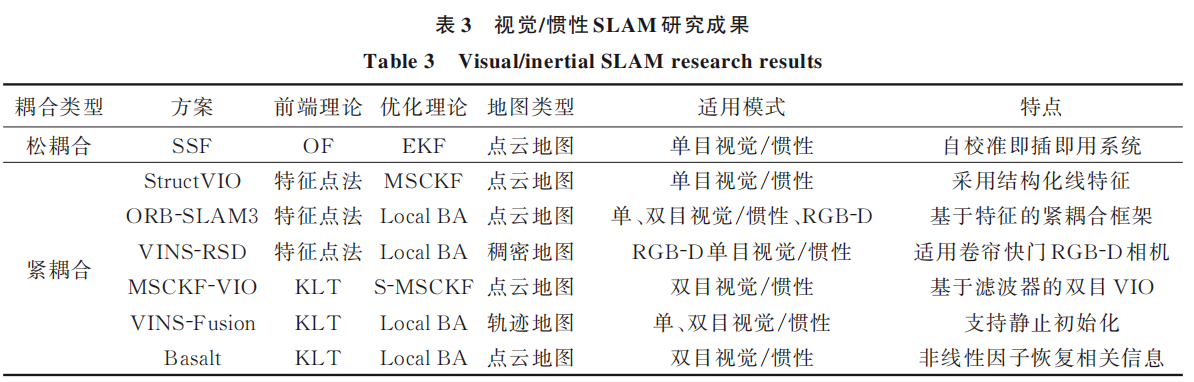
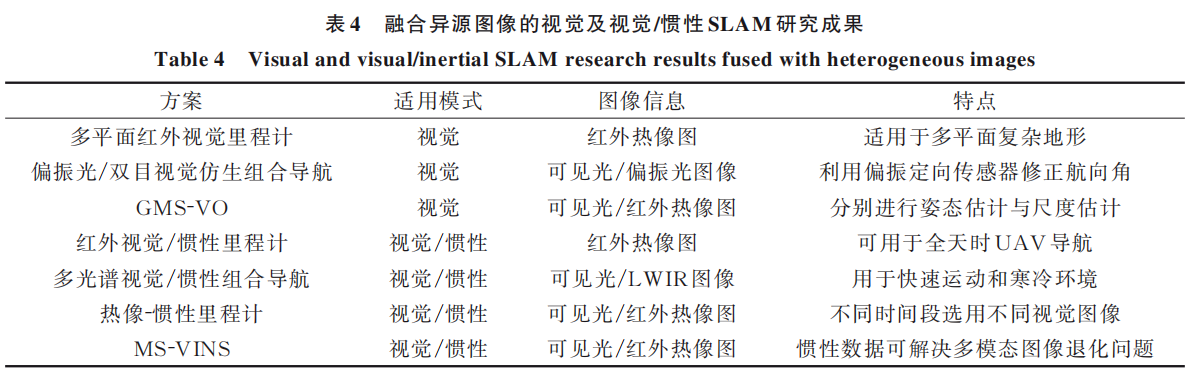
- 理论优化改进:由于应用场景需求的多样化,结合惯性、异源图像等多传感器的信息融合模式成为 SLAM 主流,促进了以紧耦合为主的信息融合理论发展,而随着大场景 SLAM 应用需求及图优化理论的推进,逐步形成了基于扩展卡尔曼滤波框架的改进滤波器优化架构,和以光束法平差(BA)为主的非线性优化架构两种研究趋势。
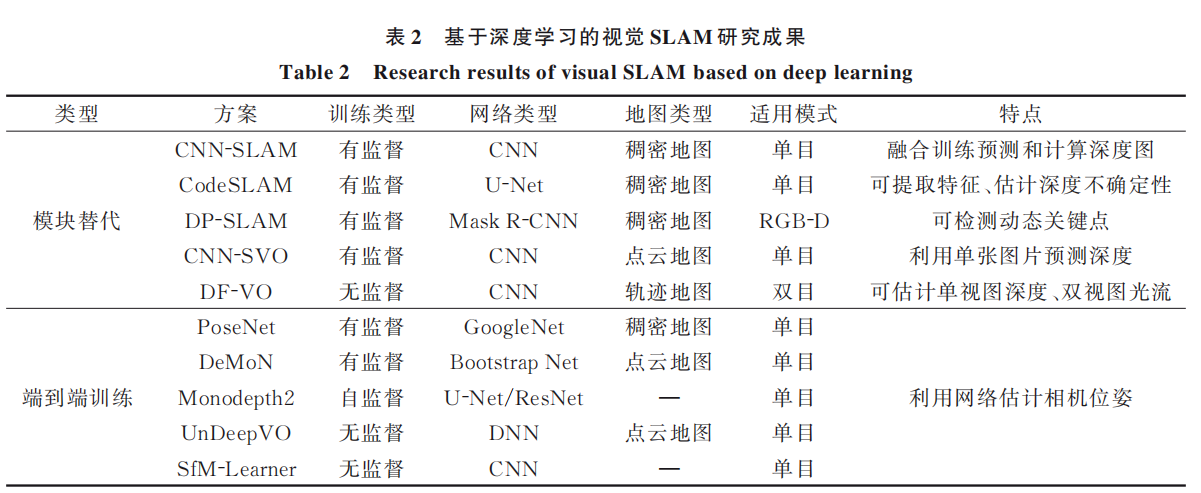
- 新型技术引入:随着深度学习技术在计算机视觉中的广泛应用,视觉 SLAM 呈现出由传统几何变换方式逐步转向结合深度学习的智能融合趋势。一方面视觉图像与语义信息的紧密联系,使得集成语义信息的视觉 SLAM 得到更多探索;另一方面为减少对传统方式依赖,利用神经网络架构替代 SLAM 的部分模块或端到端强化学习的模式得以广泛研究。
- 应用领域推广:视觉 SLAM 目前在智能家居、自动驾驶、无人机等领域得到了不同层次的应用,随着硬件性能的提升,视觉 SLAM
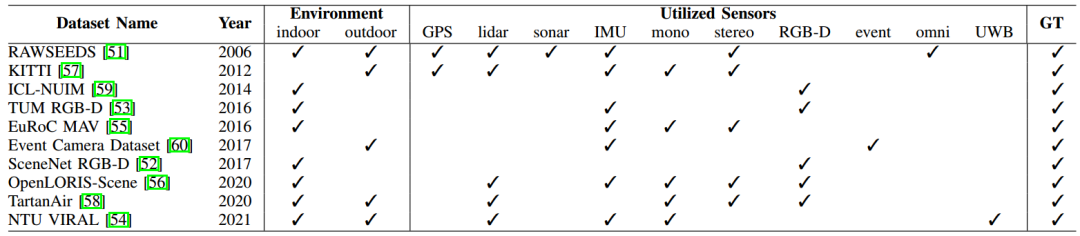
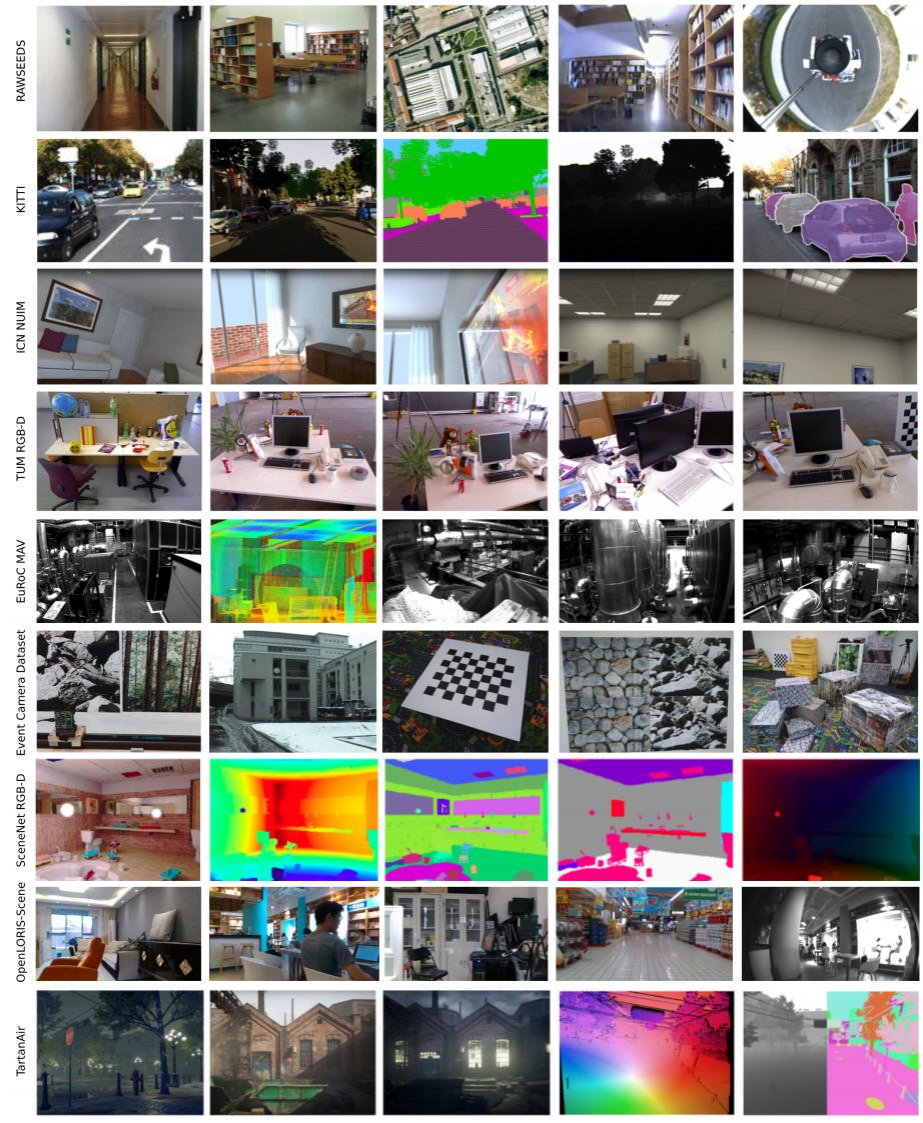
VSLAM 常用数据集:表内的GT 是指真值的可用性