MonoScene在服务器上环境搭建以及运行记录
conda环境
pytorch-lightning_libgcc_mutex 0.1 main defaults
_openmp_mutex 5.1 1_gnu defaults
absl-py 2.0.0 pypi_0 pypi
aiohttp 3.8.6 pypi_0 pypi
aiosignal 1.3.1 pypi_0 pypi
antlr4-python3-runtime 4.8 pypi_0 pypi
async-timeout 4.0.3 pypi_0 pypi
asynctest 0.13.0 pypi_0 pypi
attrs 23.1.0 pypi_0 pypi
blas 1.0 mkl defaults
ca-certificates 2023.08.22 h06a4308_0 defaults
cachetools 5.3.2 pypi_0 pypi
certifi 2022.12.7 py37h06a4308_0 defaults
charset-normalizer 3.3.1 pypi_0 pypi
cudatoolkit 10.2.89 hfd86e86_1 defaults
cycler 0.11.0 pypi_0 pypi
fonttools 4.38.0 pypi_0 pypi
freetype 2.12.1 h4a9f257_0 defaults
frozenlist 1.3.3 pypi_0 pypi
fsspec 2023.1.0 pypi_0 pypi
future 0.18.3 pypi_0 pypi
giflib 5.2.1 h5eee18b_3 defaults
google-auth 2.23.3 pypi_0 pypi
google-auth-oauthlib 0.4.6 pypi_0 pypi
grpcio 1.59.0 pypi_0 pypi
hydra-core 1.0.5 pypi_0 pypi
idna 3.4 pypi_0 pypi
imageio 2.31.2 pypi_0 pypi
importlib-metadata 6.7.0 pypi_0 pypi
importlib-resources 5.12.0 pypi_0 pypi
intel-openmp 2021.4.0 h06a4308_3561 defaults
joblib 1.3.2 pypi_0 pypi
jpeg 9b h024ee3a_2 defaults
kiwisolver 1.4.5 pypi_0 pypi
lcms2 2.12 h3be6417_0 defaults
ld_impl_linux-64 2.38 h1181459_1 defaults
libffi 3.4.4 h6a678d5_0 defaults
libgcc-ng 11.2.0 h1234567_1 defaults
libgomp 11.2.0 h1234567_1 defaults
libpng 1.6.39 h5eee18b_0 defaults
libstdcxx-ng 11.2.0 h1234567_1 defaults
libtiff 4.1.0 h2733197_1 defaults
libuv 1.44.2 h5eee18b_0 defaults
libwebp 1.2.0 h89dd481_0 defaults
llvmlite 0.36.0 pypi_0 pypi
lz4-c 1.9.4 h6a678d5_0 defaults
markdown 3.4.4 pypi_0 pypi
markupsafe 2.1.3 pypi_0 pypi
matplotlib 3.5.3 pypi_0 pypi
mkl 2021.4.0 h06a4308_640 defaults
mkl-service 2.4.0 py37h7f8727e_0 defaults
mkl_fft 1.3.1 py37hd3c417c_0 defaults
mkl_random 1.2.2 py37h51133e4_0 defaults
monoscene 0.0.0 dev_0 <develop>
multidict 6.0.4 pypi_0 pypi
ncurses 6.4 h6a678d5_0 defaults
networkx 2.6.3 pypi_0 pypi
ninja 1.10.2 h06a4308_5 defaults
ninja-base 1.10.2 hd09550d_5 defaults
numba 0.53.0 pypi_0 pypi
numpy 1.20.3 pypi_0 pypi
nvidia-cublas-cu11 11.10.3.66 pypi_0 pypi
nvidia-cuda-nvrtc-cu11 11.7.99 pypi_0 pypi
nvidia-cuda-runtime-cu11 11.7.99 pypi_0 pypi
nvidia-cudnn-cu11 8.5.0.96 pypi_0 pypi
oauthlib 3.2.2 pypi_0 pypi
omegaconf 2.0.6 pypi_0 pypi
opencv-python 4.5.1.48 pypi_0 pypi
openssl 1.1.1w h7f8727e_0 defaults
packaging 23.2 pypi_0 pypi
pillow 9.3.0 py37hace64e9_1 defaults
pip 22.3.1 py37h06a4308_0 defaults
protobuf 3.19.6 pypi_0 pypi
pyasn1 0.5.0 pypi_0 pypi
pyasn1-modules 0.3.0 pypi_0 pypi
pydeprecate 0.3.1 pypi_0 pypi
pyparsing 3.1.1 pypi_0 pypi
python 3.7.16 h7a1cb2a_0 defaults
python-dateutil 2.8.2 pypi_0 pypi
pytorch-lightning 1.4.9 pypi_0 pypi
pywavelets 1.3.0 pypi_0 pypi
pyyaml 5.3.1 pypi_0 pypi
readline 8.2 h5eee18b_0 defaults
requests 2.31.0 pypi_0 pypi
requests-oauthlib 1.3.1 pypi_0 pypi
rsa 4.9 pypi_0 pypi
scikit-image 0.18.1 pypi_0 pypi
scikit-learn 0.24.0 pypi_0 pypi
scipy 1.7.3 pypi_0 pypi
setuptools 65.6.3 py37h06a4308_0 defaults
six 1.16.0 pyhd3eb1b0_1 defaults
sqlite 3.41.2 h5eee18b_0 defaults
tbb 2020.2 hff7bd54_0 defaults
tensorboard 2.11.2 pypi_0 pypi
tensorboard-data-server 0.6.1 pypi_0 pypi
tensorboard-plugin-wit 1.8.1 pypi_0 pypi
threadpoolctl 3.1.0 pypi_0 pypi
tifffile 2021.11.2 pypi_0 pypi
tk 8.6.12 h1ccaba5_0 defaults
torch 1.13.1 pypi_0 pypi
torchaudio 0.7.2 py37 pytorch
torchmetrics 0.6.0 pypi_0 pypi
torchvision 0.8.2 py37_cu102 pytorch
tqdm 4.49.0 pypi_0 pypi
typing_extensions 4.3.0 py37h06a4308_0 defaults
urllib3 2.0.7 pypi_0 pypi
werkzeug 2.2.3 pypi_0 pypi
wheel 0.38.4 py37h06a4308_0 defaults
xz 5.4.2 h5eee18b_0 defaults
yarl 1.9.2 pypi_0 pypi
zipp 3.15.0 pypi_0 pypi
zlib 1.2.13 h5eee18b_0 defaults
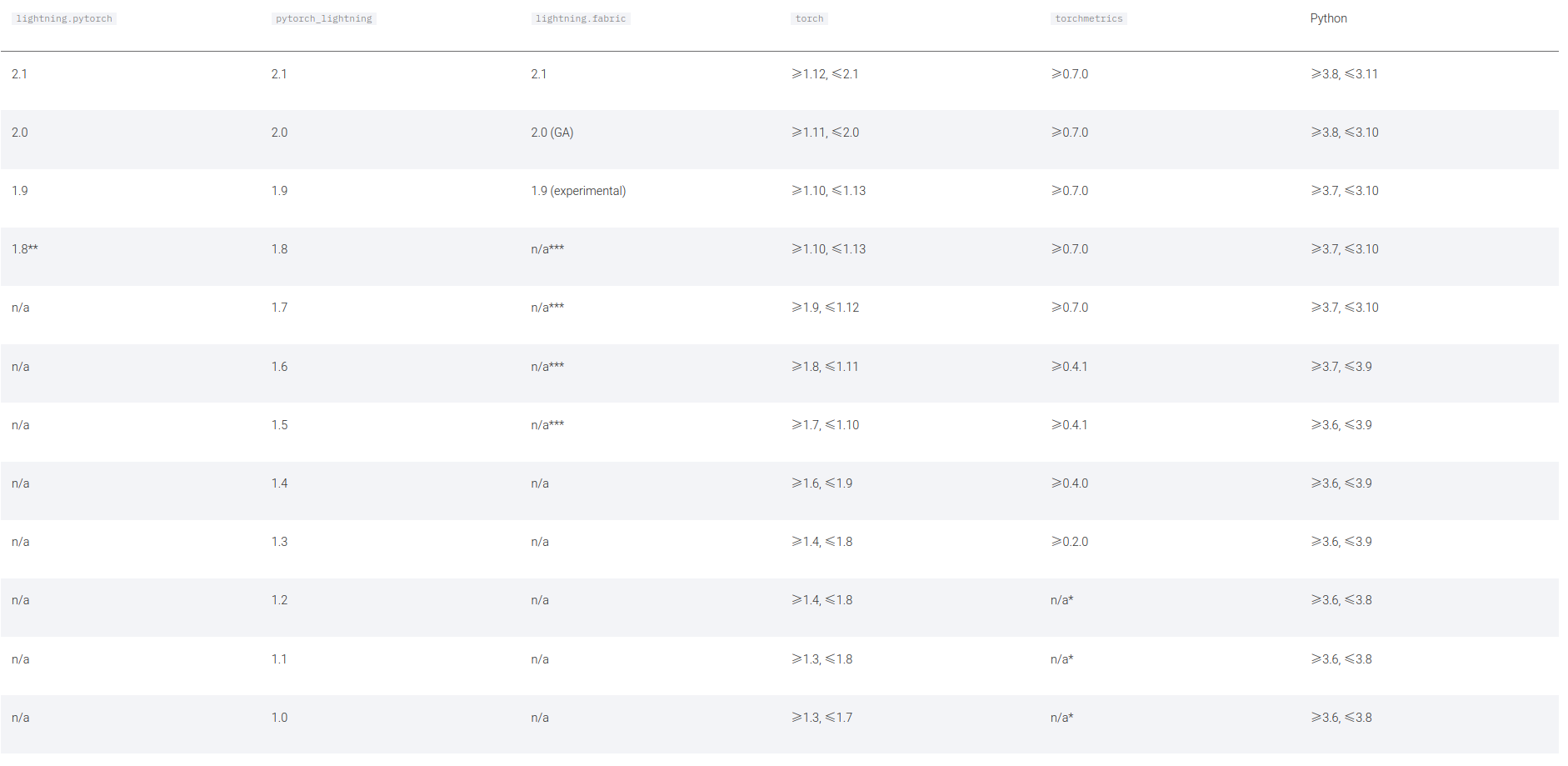
zstd 1.4.9 haebb681_0 defaults需要注意的是这里使用了pytorch-lightning,版本对应安装
数据集使用SemanticKITTI以及NYUv2
Semantic Scene Completion dataset v1.1下载地址
$ export KITTI_PREPROCESS=/home3/dataset/kitti/preprocess
$ export KITTI_ROOT=/home3/dataset/kitti/semantic_kitti
$ export KITTI_LOG=/home3/chenhaiyang/MonoScene/monoscene/data/semantic_kitti/logdirKITTI_PREPROCESS保存的是未处理的数据
KITTI_ROOT保存的是处理后的数据
KITTI_LOG保存的是日志文件
kitti数据集标注解释
1惯性导航系统(GPS / IMU):OXTS RT 3003
1台激光雷达:Velodyne HDL-64E
2台灰度相机,1.4百万像素:Point Grey Flea 2(FL2-14S3M-C)
2个彩色摄像头,1.4百万像素:Point Grey Flea 2(FL2-14S3C-C)
4个变焦镜头,4-8毫米:Edmund Optics NT59-917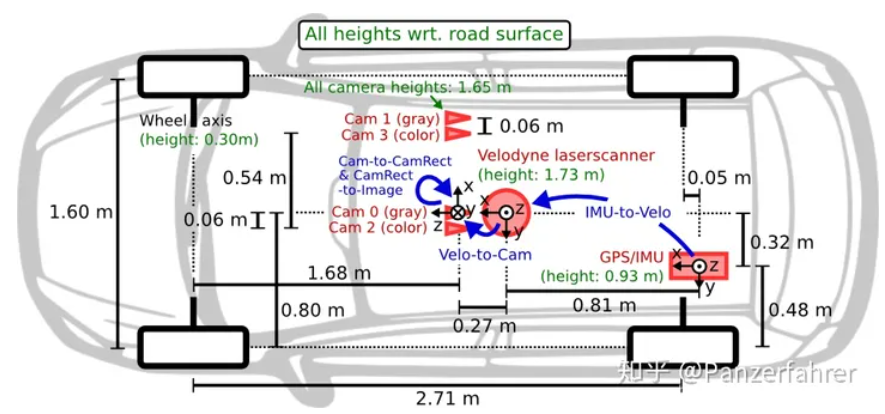
calib.txt 标定文件解读
在calib文件中,有sequence 00-21序列,包括calib.txt 和 times.txt文件。
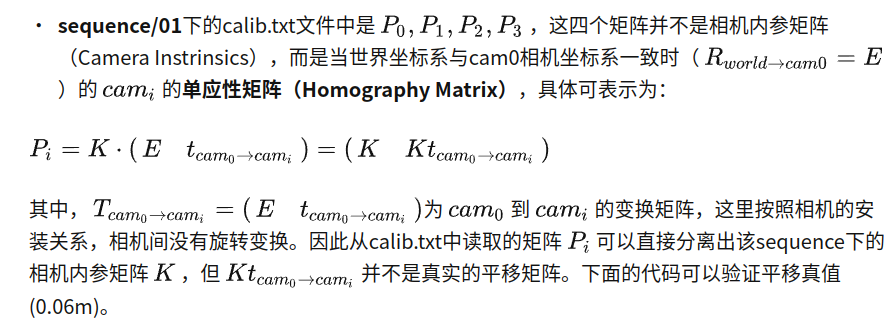
在sequence calib.txt 中,
P0: 7.188560000000e+02 0.000000000000e+00 6.071928000000e+02 0.000000000000e+00 0.000000000000e+00 7.188560000000e+02 1.852157000000e+02 0.000000000000e+00 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 0.000000000000e+00
P1: 7.188560000000e+02 0.000000000000e+00 6.071928000000e+02 -3.861448000000e+02 0.000000000000e+00 7.188560000000e+02 1.852157000000e+02 0.000000000000e+00 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 0.000000000000e+00
P2: 7.188560000000e+02 0.000000000000e+00 6.071928000000e+02 4.538225000000e+01 0.000000000000e+00 7.188560000000e+02 1.852157000000e+02 -1.130887000000e-01 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 3.779761000000e-03
P3: 7.188560000000e+02 0.000000000000e+00 6.071928000000e+02 -3.372877000000e+02 0.000000000000e+00 7.188560000000e+02 1.852157000000e+02 2.369057000000e+00 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 4.915215000000e-03
Tr: 4.276802385584e-04 -9.999672484946e-01 -8.084491683471e-03 -1.198459927713e-02 -7.210626507497e-03 8.081198471645e-03 -9.999413164504e-01 -5.403984729748e-02 9.999738645903e-01 4.859485810390e-04 -7.206933692422e-03 -2.921968648686e-010,1,2,3 代表相机的编号,0表示左边灰度相机,1右边灰度相机,2左边彩色相机,3右边彩色相机。Tr表示将velodyne坐标系转换到左边相机系统坐标。
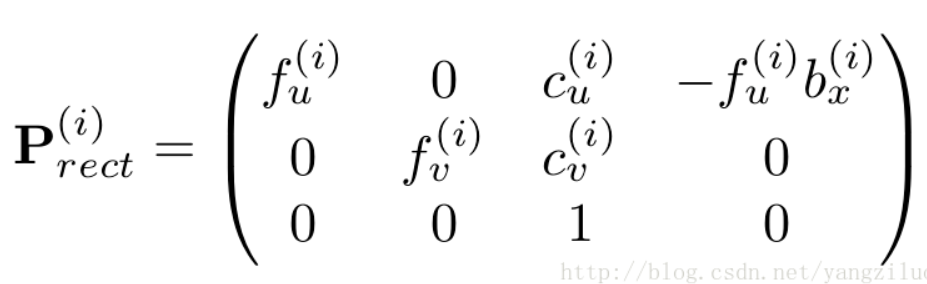
根据calib.txt相机投影矩阵可以得到相机内参。
网络训练
python monoscene/scripts/train_monoscene.py \
dataset=kitti \
enable_log=true \
kitti_root=$KITTI_ROOT \
kitti_preprocess_root=$KITTI_PREPROCESS\
kitti_logdir=$KITTI_LOG \
n_gpus=3 batch_size=3服务器上的显存不够,训练不了
为了能够训练,可能采取的方法:
- 更改2D解码器的特征尺寸
- 缩小输入图像:还需要调整投影矩阵
- 通过更改basemodel_name 和 num_features来使用较小的 2D 主干。
- 减少3D网络的特征维度
- 尝试先禁用或减小上下文的大小
记录一下代码的构造
2d unet结构的创建 编码器使用rwightman/gen-efficientnet-pytorch下的tf_efficientnet_b7_ns作为backbone,解码器自己创建的上采样层
FLoSP结构将2d特征提升至三维的
3D UNets:2层 encoder-decoder 结构,用于提取 3d 特征
completion head:3D ASPP 结构和 softmax 层,用于处理 3D UNet 输出得到3d场景 completion 结果
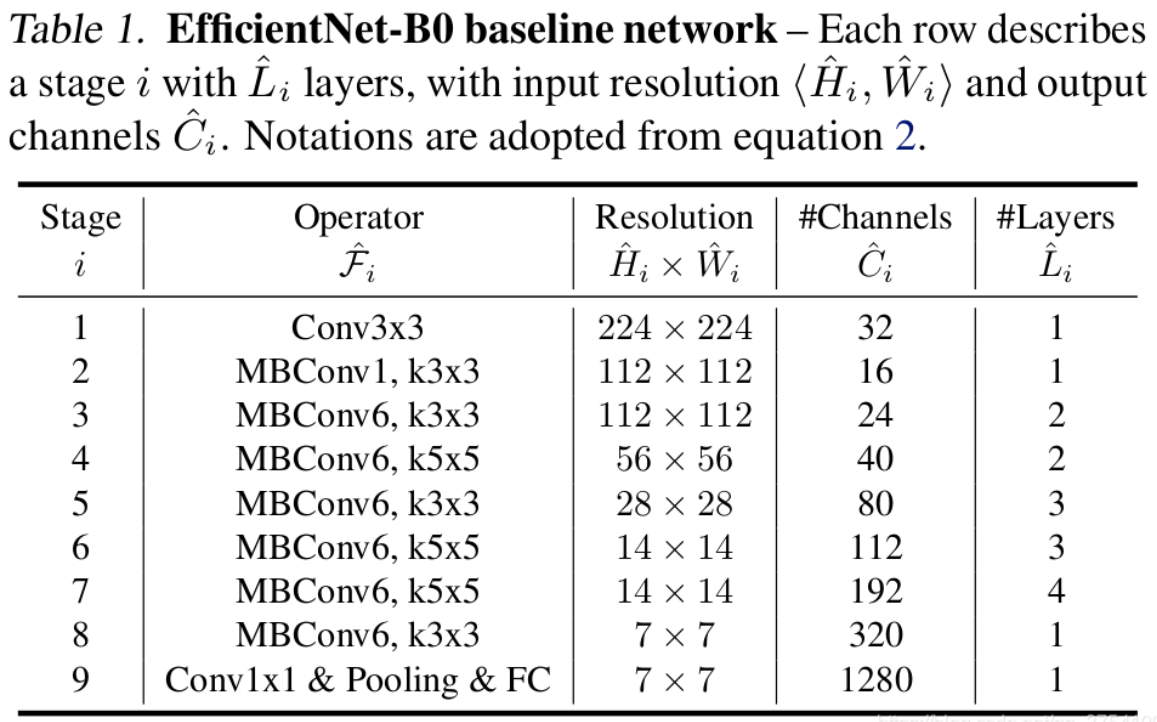
介绍一下efficientnet
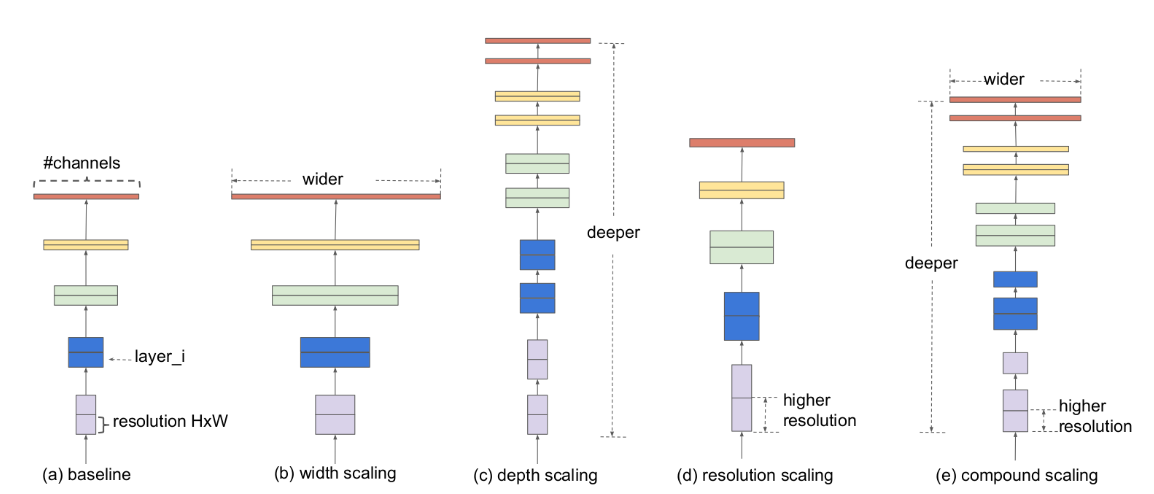
在之前的一些论文中,有的会通过增加网络的width即增加卷积核的个数(增加特征矩阵的channels)来提升网络的性能如图(b)所示,有的会通过增加网络的深度即使用更多的层结构来提升网络的性能如图(c)所示,有的会通过增加输入网络的分辨率来提升网络的性能如图(d)所示。而在本篇论文中会同时增加网络的width、网络的深度以及输入网络的分辨率来提升网络的性能如图(e)所示:

未完待续~



